Name des Teilnehmers: Kailai Li
Beschreibung des IT-Forschungsprojekts: Drahtlose Sensornetzwerke werden als Infrastruktur in verschiedenen Anwendungsszenarien wie autonomes Fahren, Innenlokalisierung und -Überwachung sowie Roboternavigation usw. eingesetzt. Insbeson- dere die genaue und robuste Lokalisierung mobiler Agenten und die Kartierung wie z.B. für das Shop Floor Monitoring spielen im Kontext von intelligenten Fabriken und Industrie 4.0 eine zentrale Rolle. Aufgrund von Vorteilen wie der hohen Datenrate und Präzision sowie der geringen Leistungsaufnahme kommen Ultrabreitband (UWB)-Sensornetze in intelligenten Fabriken in umfangreichen Anwendungen zum Einsatz.
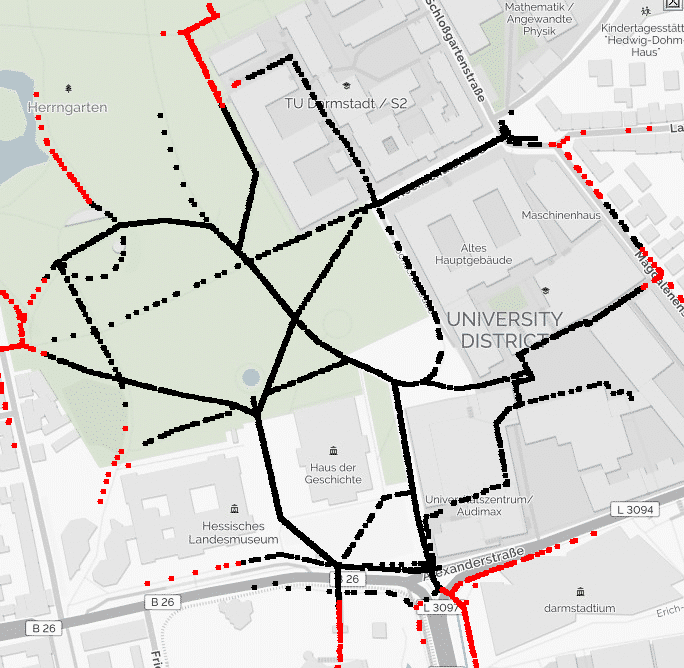
Ziel des Projekts ist die Entwicklung von Algorithmen zur Objektposenverfolgung und Kartenerstellung unter Verwendung von UWB-basierten Sensornetzwerken. Das zentrale Anwendungsszenario ist hier die Produktionsüberwachung in intelligenten Fabriken, in denen Produktkomponenten, Maschinen und Flurförderfahrzeuge verfolgt werden sollen und die daraus resultierende dynamisch wechselnde Karte, die in Echtzeit mit angemessener Detaillierung und Genauigkeit rekonstruiert bzw. aktualisiert werden soll. Um dieses Ziel zu erreichen, sind einige Aspekte besonders zu berücksichtigten. Erstens soll die aktuelle UWB-Inertial-Positionierungstechnik des Industriepartners zu einer 6-DoF-Posenverfolgung mit verbesserter Genauigkeit und Robustheit aufgerüstet werden. Innerhalb des Posentrackers soll ein Online- Kalibrieralgorithmus entwickelt werden, der eine bessere Skalierbarkeit ermöglicht und den Aufwand für den Einsatz von UWB-Sensornetzen in der Praxis reduziert. Zweitens sollen Algorithmen zur Erzeugung einer zweidimensionalen Karte der sich dynamisch verändernden Produktionsfläche entwickelt werden, die nur auf den Trajektorien der verfolgten Ziele basieren. Drittens sollen Sensoren anderer Art, wie magnetische Sensoren, Kameras oder LiDAR, als Knoten in das bestehende UWB-Inertialsensornetzwerk integriert werden. Von diesen heterogenen Netze wird erwartet, dass sie sich vorteilhaft auf die Performance des Trackings und des Mappings auswirken.
Software Campus-Partner: KIT, Trumpf
Umsetzungszeitraum: 01.01.2020 – 31.05.2021