Name des Teilnehmers: Igor Vozniak
Beschreibung des IT-Forschungsprojekts: Der Bereich autonomes Fahren und die damit verbundenen Herausforderungen haben in den letzten Jahren viel Aufmerksamkeit gewonnen. Trotz beeindruckender Erfolge bleibt das Ziel, ein vollautomatisches Fahren (L5) gemäß SAE-Klassifikation zu erreichen, eine Herausforderung, wobei die Kernkomponenten für den erfolgreichen Einsatz dieser Systeme die gleichen bleiben, nämlich die Sicherheit von Passagieren von autonomen Fahrzeugen sowie der anderen Verkehrsteilnehmer, z.B. Fußgänger, andere Fahrzeuge. Diese Arbeit zielt darauf ab, einen weiteren Schritt hin zu zertifizierten autonomen Fahrzeugen (L4-L5) zu machen, wobei wir einer gemeinsamen Systemvalidierungstechnik folgen, indem wir das reale Problem in eine synthetische Domäne verlagern, z.B. in simulierten Umgebungen wie OpenDS.
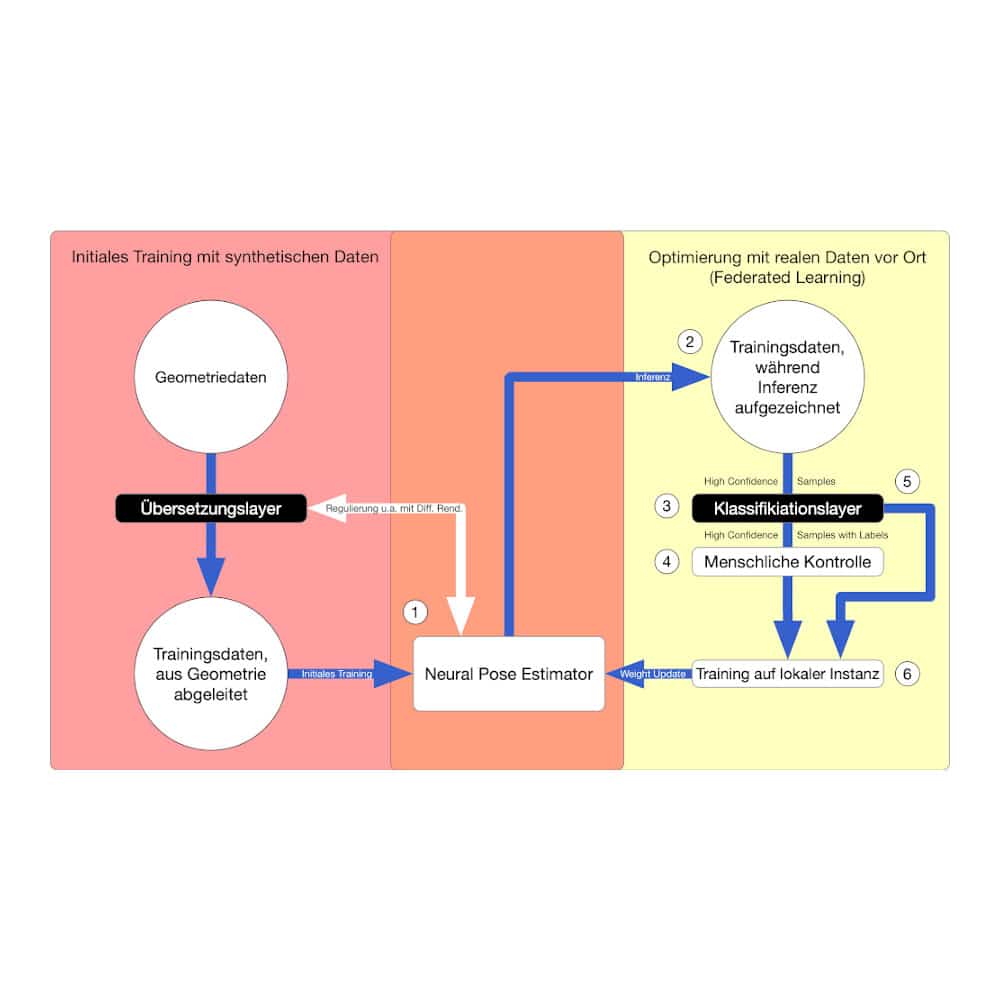
Darüber hinaus schlagen wir eine andere Sicht auf die Herausforderung der Generierung kritischer Szenarien aus der Perspektive der statischen Elemente der simulierten Szene vor. Gemäß unserer wissenschaftlichen Hypothese muss die geometrische/architektonische Komplexität der verwendeten Gebäude berücksichtigt werden und Teil der Szenenkomplexitätsmetriken für die weitere Validierung der adaptiven Fahrassistenzsysteme (ADAS) des Fahrzeugs sein. Während des gesamten Arbeitsablaufs wird eine neuartige Pipeline implementiert, in der wir openSCENE als Ergänzung zu bestehenden offenen Formaten, nämlich openDrive, openCRG, openSCENARIO, OSI , vorschlagen, die im Prozess der Generierung kritischer Szenarien auf breiter Basis anwendbar sind.
Der Hauptbeitrag des openSCENE-Projekts ist die vorgeschlagene Toolchain, die in der Lage ist, hochrealistische Kopien von Gebäuden in 3D-Formaten (Mesh-Objekte) automatisch zu rekonstruieren, wobei KI-Methoden und unstrukturierte Punktwolkendaten (PCD) als einzige Eingabe verwendet werden. Darüber hinaus führen wir eine Erweiterung ein, nämlich die Erzeugung von ungesehenen 3D-Modellen von Gebäuden mit einem manuell festgelegten Level an architektonischer Ähnlichkeit. Ziel des Projekts ist die Vervollständigung des Konzepts des Digital-Reality-Loop (durch Verlagerung der Herausforderung auf eine simulierte Umgebung) für die Erzeugung kritischer Szenarien, die für die Bewertung und Zertifizierung autonomer Fahrzeuge unerlässlich sind, indem die im Rahmen dieses Projekts eingeführten Kritikalitätsmetriken herangezogen werden. Deren Zweck ist es, den Zusammenhang zwischen den verwendeten statischen Gebäuden eines bestimmten Architekturstils und der Kritikalität des Verkehrsszenarios zu erkennen.
Das Projekt OpenSCENE wird von der Firma FARO (Datenpartner), dem innovativen Branchenführer für hochauflösende LIDAR-Sensoren und Punktwolken-Post-Processing, durch die Bereitstellung der Ground-Truth-Daten unterstützt.
Software Campus-Partner: DFKI, Huawei
Umsetzungszeitraum: 01.01.2021 – 31.12.2022