Name des Teilnehmers: Frederik Wiehr
Beschreibung des IT-Forschungsprojekts: Fahrerassistenzsysteme spielen eine große Rolle sowohl seitens der Sicherheit als auch hinsichtlich des Komforts. Die meisten solcher Systeme erfordern eine grundlegende Situationsanalyse (SIT), in der anhand der Sensordaten des Autos verschiedene Hypothesen über die Wahrscheinlichkeit eintretender Ereignisse in der Umgebung errechnet werden. Beispielsweise verwendet Adaptive Cruise Control (ACC) als Sensoren ein Mitteldistanz- und ein Langdistanz-Radar sowie eine Stereo Kamera, um automatisch während der Fahrt einen sicheren Abstand zu dem vorausfahrenden Fahrzeug zu halten. Die Kombination aus ACC und einer Vielzahl von anderen Systemen bilden die technische Basis für einen hohen Automatisierungsgrad beim Fahren.
Im Übergang zum hochautomatisierten Fahren ergeben sich jedoch gänzlich neue Fragestellungen, da es nun Phasen gibt in denen durch den Fahrer keine Überwachung der Fahrsituation mehr stattfindet. Während dieser Phasen kann der Fahrer Nebentätigkeiten nachgehen, wie z.B. das Beantworten von Emails, Telefonieren, oder die Unterhaltung durch Filme oder Serien. In solchen Situationen kann das Auto die Übernahme der Kontrolle durch den Fahrer anfordern: der sogenannte “takeover request”. Das Auto muss in diesem Fall in der Situationsanalyse entscheiden, ob der Fahrer aktuell dazu in der Lage ist die Kontrolle über das Fahrzeug übernehmen zu können. Dazu muss vor allem seine visuelle Wahrnehmung innerhalb und außerhalb des Autos analysiert werden.
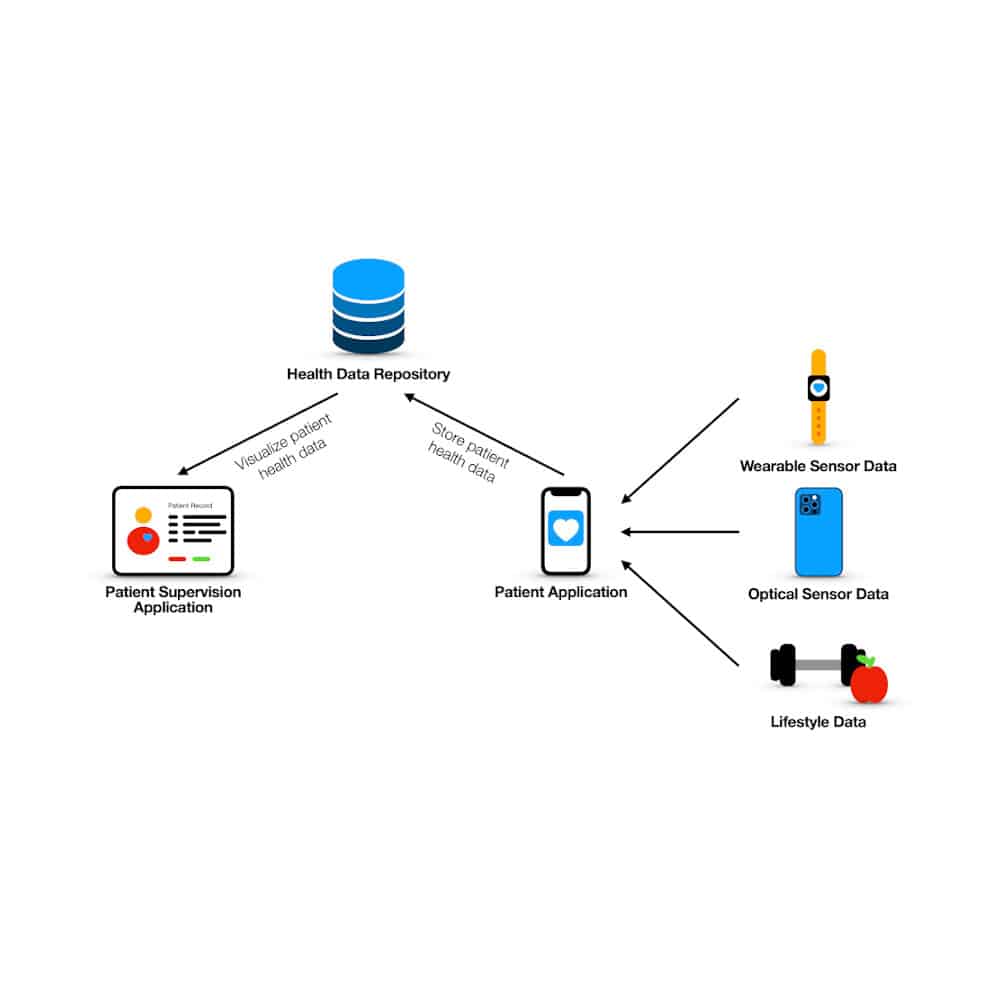
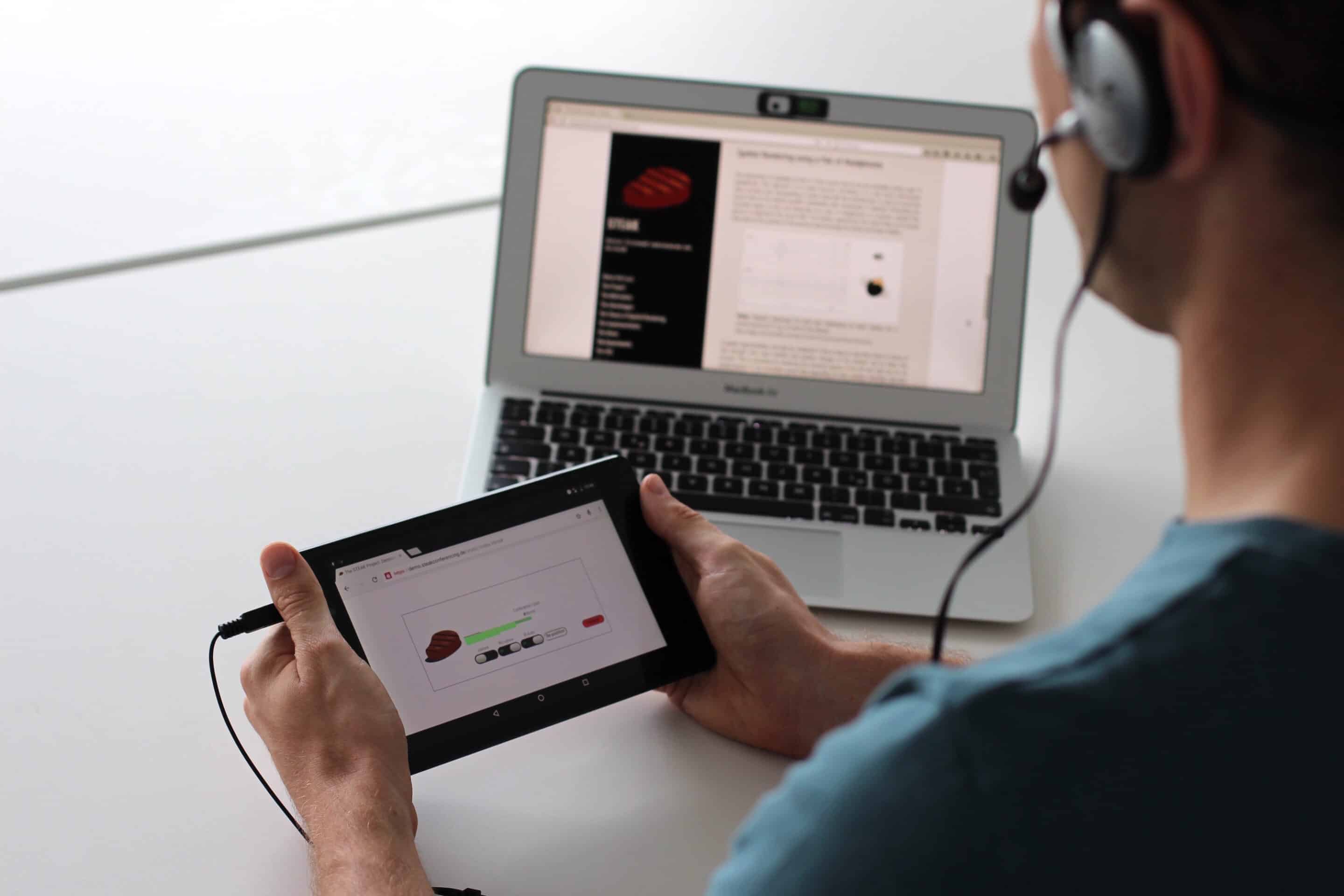
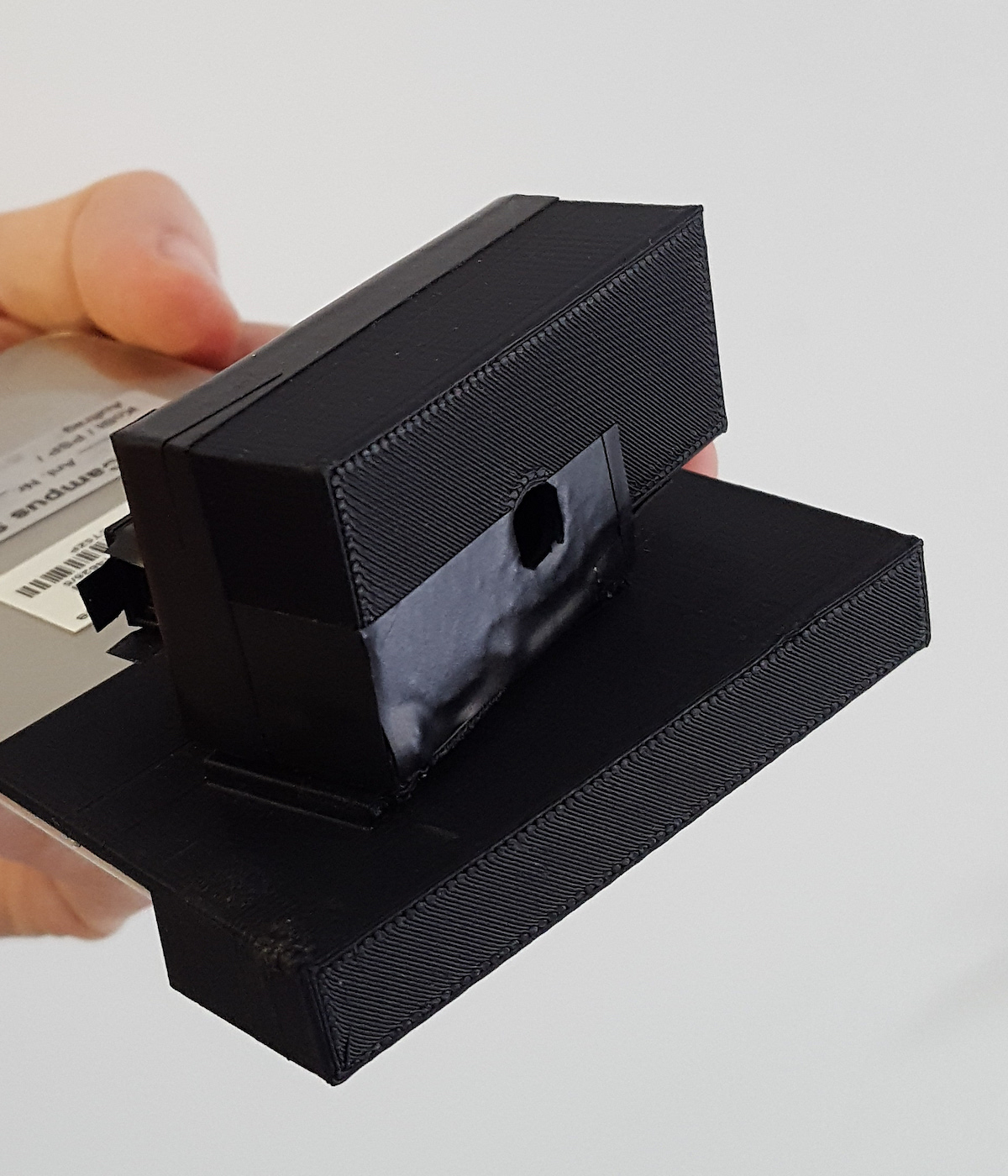
Ziel dieses Projektes ist es ein System zu entwicklen, das mittels verschiedener Sensorik, die sowohl in die direkte Umgebung als auch in am Körper getragene Geräte integriert ist, das räumliche Situationsbewusstsein des Fahrers zu messen. Der Schwerpunkt in diesem Projekt liegt in der Analyse der visuellen Wahrnehmung des Fahrers. Anhand derer soll das Situationsbewusstsein des Fahrers in einem begrenzten Zeitraum abgeschätzt werden. Dazu muss vor allem die Blickrichtung überwacht und entsprechend auf die Umgebung projiziert werden. Es werden zwei Fälle unterschieden: zum einen kann sich das Blickfeld des Fahrers auf Elemente innerhalb des Fahrzeuges richten, z.B. das Infotainmentsystem, ein Smartphone, Tablet, oder Fahrzeug-Instrumente. Zum anderen kann der Fahrer seine Aufmerksamkeit auf Objekte in Außenumgebung richten. Die semantische Analyse der gewonnen Daten soll einen indirekten Einblick in die kognitive Aktivität des Fahrers geben und kann dem System Aufschluss darüber geben, ob eine Kontrollübergabe an den Fahrer aktuell möglich ist. Dazu muss der Fahrer Kenntnis über Standort, Fahrtrichtung, und Geschwindigkeit des Fahrzeugs sowie relevante Objekte in Fahrzeugumgebung haben. Sind diese Voraussetzungen nicht in ausreichender Weise gegeben – der Fahrer könnte beispielsweise eingeschlafen sein – so muss das System entsprechend reagieren, z.B. den nächstgelegenen Rastplatz auf der Autobahn ansteuern.
Software Campus-Partner: DFKI, Robert Bosch GmbH
Umsetzungszeitraum: 01.04.2016 – 31.10.2017